메이커를 위한 실전 모터 가이드(4) - BLDC
-BLDC 구조
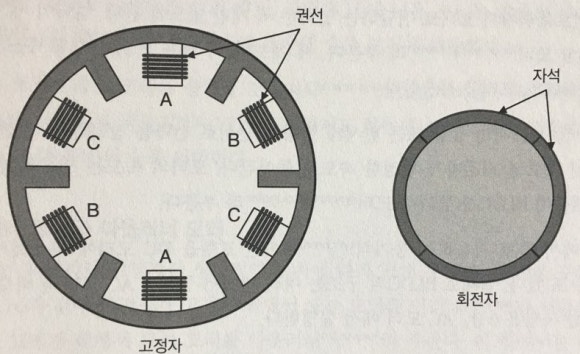
컨트롤러로부터 각 권선에 양극과 음극 전류가 교차해 전달되면서 발생하는 전류의 변화에 따라 회전자가 회전한다.
권선
그림을 보면 여섯 개의 권선이 '슬롯'이라 부르는 지점에 고정돼 있다. 콘트롤러는 이러한 권선에 전달하는 전류를 조절해 모터의 동작을 제어한다. 이때 권선에 전류를 전달하는 과정을 에너지를 공급한다(energize)고 표현하고, 이렇게 전달된 전류로 인해 자속이 발생하는 것을 '여자'(exitation)라고 표현한다.
속도가 낮을 때 BLDC의 회전자는 고정자의 슬롯에 정렬되기도 한다. 그래서 회전보다는 제자리에 머물려는 듯한 현상이 나타난다. 이러한 현상을 '코킹'이라 부르며, 이로인해 회전자가 덜컥거리며 회전하게 된다. 이를 해결하기 위해 슬롯이 없는 고정자를 사용한다. 회전자와 고정자 사이의 공극(에어 갭)이 훨씬 크기 때문에 권선을 더 많이 달아야하는 문제가 있다.
자석
브러시 모터에서는 자석이 고정자에 붙어있고, BLDC에서는 자석이 회전자 위에 놓여있다. 회전자에 달린 각 자석의 극(자기극)을 극(pole)이라 부른다. 일반적으로 극의 수가 많을수록 토크가 높아진다.
슬롯/극 설정
정수형 슬롯 모터에서 슬롯의 개수는 극의 개수의 배수다. 분수형 슬롯 모터에서 슬롯의 개수는 극의 개수의 정수 배가 아니다. 코깅 현상을 줄이려면 대체로 분수형 슬롯 모터를 사용하는 것이 좋다.
-인러너 모터와 아웃러너 모터
회전자가 고정자 안에서 도는 모터를 인러너
회전자가 고정자 밖에서 도는 모터를 아웃러너
인러너
인러너 모터는 대부분 철심이 없다. 철심 손실이 없어 효율이 높지만, 모터에서 발생하는 토크도 크게 줄어든다. 인러너 모터는 대체로 극 수가 적어(대부분 2개) 대부분 기어를 장착한다.
아웃러너
자석이 바깥쪽 케이스에 달려있어 인러너 모터보다 자석의 수가 대체로 많다.
아웃러너 모터는 인러너 모터만큼 빠르게 회전하지 못한다. 하지만 토크는 훨씬 높다. 그래서 비행기 모형에도 많이 사용한다.
인러너 모터와 아웃러너 모터를 구분하는 또 다른 차이점은 모터의 샤프트(축)에 있다. 인러너 모터의 샤프트는 내부 회전자에 연결돼 있는 반면, 아웃러너 모터의 샤프트는 셸에 연결된다.
-BLDC 제어법
BLDC는 펄스로 전력을 공급받는다. 입력의 수는 모터의 위상수에 따라 결정된다. 대부분 3 개의 입력을 받는다.
정확하게 제어하려면 펄스의 타이밍이 정확해야 한다. 그래야 회전자가 정확한 위치에 있을 때 전류가 전달될 수 있다. 회전자의 위치를 알아 내기 위해 역기전력 측정또는 모터에 내장된 센서로 회전자의 위치를 알아낸다.
신호 및 인버터를 이용한 제어
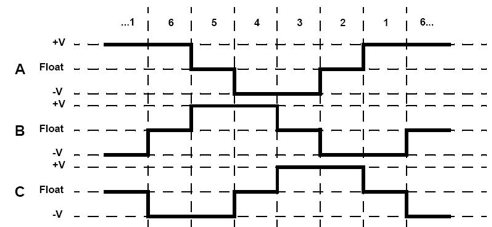
3상 BLDC는 권선에 전류를 전달하는 입력이 3 개다. 항상 하나는 High(V+), 하나는 Low(V-), 나머진 Floating이다.
커트롤러에서 공급하는 전류의 양이 늘어날수록 모터가 회전할 때 발생하는 토크도 커진다. 펄스의 순서와 타이밍을 반대로 하면, 모터의 회전 방향도 반대로 바뀐다. 그래서 BLDC 제어 회로에는 H 브릿지와 같은 장치가 필요없다.
BLDC는 전압 소스 인버터 또는 인버터라 부르는 특수한 스위칭 회로를 통해 전력을 공급받는다.
센서를 이용한 제어
컨트롤러에서 권선에 전류를 공급하기 전에 먼저 회전자의 방향을 알아야 한다. 어떤 모터는 센서를 이용해 회전자의 방향과 속도를 알아낸다. 이를 '센서 기반 제어' 이라 한다. 반대로 센서가 없는 제어를 '센서리스 제어'라 한다.
이러한 센서는 회전자의 위치를 알아내기 위해 광학 인코딩, 자기 인코딩, 가변 릴럭턴스(자기 저항) 등을 이용할 수 있는데, BLDC는 hall effect 센서를 가장 많이 사용한다.
자기장이 발생할 때 전도체를 통해 전류가 흘러오면, 전류의 방향과 반대되는 전압이 발생한다. 이를 hall effect라 한다. 이때 발생 전압을 Hv(홀 전압)이라 하며 전류와 자기장의 곱에 비례한다.
홀센서가 달린 모터는 컨트롤러에서 가 권선의 Vh 값을 읽을수 있도록 전기선이 별도로 연결돼 있다. 컨트롤러는 이를 이용해 알아낸 자기장 방향으로 회전자의 방향을 알아낸다.
센서리스 제어
역기전력을 이용해 회전자의 방향을 알아낸다. 어느 시점에서든 BLDC의 두 위상이 설정돼 있고 나머진 플로팅 상태다. 컨트롤러는 이렇게 플로팅 상태에 있는 권선의 전압을 측정해 역기전력을 알아낸다.
간단하게 설명하자면 컨트롤러는 모터의 권선에 전률 전달해 회전시킨다. 이후 역기전력을 보고 회전자의 방향을 알아내고, 이후 그 정보를 이용해 모터의 권선에 공급되는 펄스를 동기화한다.
회전자의 방향을 계산할 때 흔히 사용하는 방법은 역기전력이 0이 되는 시점에 적분하는 것이다. 이를 'ZCD'(영전류 감지)라 부른다. ZCD 기법은 계산이 간단하지만 역기전력 신호에서 노이즈를 걸러내야 하고 고속으로 회전할 때는 적용할 수 없다는 단점이 있다.
회전자의 방향을 알아내는 기법 중에서 최근에 나온 것으로 확장 칼만 필터(EKF)가 있다. 수식은 상당히 복잡하지만, 노이즈에 영향을 받지 않는다.
마지막으로 BLDC권선에서 발생하는 역기전력 그래프는 대체로 사다리꼴을 띤다. 그래서 흔히 구형파 모터라 한다. 반대로 동기식 AC 모터는 사인 곡선이 나타나 정현파 모터라 부른다.