AC모터는 대부분의 가정 및 산업용 전기 제품에 사용한다. 공급되는 전기가 교류이기 때문이다.
A모터에 관련된 기술은 오래전부터 발전됐기 때문에 방대하다 2가지 기준에 따라 분류하겠다.
>>단상/다상 : 입력 전력의 전기적 상태에 따른 분류
>>동기식/비동기식 : 모터의 속도와 입력 전력의 주파수 간 관계에 따른 분류
-교류(AC)
AC가 DC에 비해 장점이 많다. 그중 특히 변압기를 이용해 AC전압을 높이거나 낮추기 쉽다는 점이 대표적이다. 따라서 전압을 높이고 전류를 낮춰서 먼 거리로 전송할 수 있다. 이렇게 낮은 전류로 보낼 수 있기 때문에 송전선의 I^2R 손실을 최대한 낮출 수 있다.
-1 단상 전력
가정용 전기 콘센트에 공급되는 전력이다. 이 말은 전력이 하나의 사인파 형태로 공급되는 것을 의미한다.
-2 3상 전력
높은 전력을 요구하는 산업용 기기에선 3상 전력을 사용한다. 3가지 사인파로 구성됐다.
- 다상 모터
산업용으로 주로 사용하는 모터다. 용도에 따라 형태는 다르지만, 고정자의 구조는 모두 동일하다. 다상 모터의 고정자에는 회전 자기장을 발생하느 권선(전자석)이 달려 있다. 이러한 회전 자기장으로 인해 회전자가 회전한다. 다상 모터의 작동 방식을 이해하려면 이러한 회전 자기장과 회전자의 속도의 관계를 이해할 필요가 있다.

전기 모터는 크게 전력이 공급되면 회전하는 회전자(로터)와 항상 제자리에 고정돼 있는 고정자(스테이터)라는 두 부분으로 구성된다. AC모터는 종류에 따라 회전자의 구조가 다르다.
다상 전력을 공급받는 모터는 권선을 위상단위로 묶는다. 다상 모터의 고정자는 입력 전력의 각 상마다 하나의 위상을 가지며, 동일한 상에 속한 권선은 모두 같은 위상의 전력을 공급받는다.
각 상에 대한 권선의 수를 극의 수라 표현하며, 항상 짝수로 구성된다.
-2 회전 자기장
입력 전력에 대한 각 상은 이에 대응되는 고정자의 상으로 전달된다. 고정자의 회전 자기장은 다상 모터의 동작에 매우 중요한 역할을 한다.
권선에서 발생하는 자기장은 권선에 흐르는 전류와 공급 전압에 비례한다. 따라서 전압의 상대적인 크기 차이를 비교하는 방식으로 자기장의 상대적인 세기를 측정할 수 있다.
-3 동기 속도
고정자의 회전 자기장 속도를 모터의 동기 속도라 한다. 이 속도는 입력 전력의 주파수에 따라 달라진다. 이 속도는 입력 전력의 주파수에 따라 달라진다. 동기 속도가 3600RPM인 3상 모터에 60Hz의 전력이 공급되면, 자기장은 초당 60번 회전한다.
AC모터는 대부분 극의 수가 2개 이상이며 네 극의로 구성된 것이 많다. 극이 많을수록 자기장이 통과해야 할 권선이 많기 때문에 동기 속도가 떨어진다. 동기속도는 Ns = 120f/p(극)로 구할 수 있다.
-4 역률
동일한 주파수에서 입력 전류와 입력 전압이 변하는데, 두 사이파 곡선의 마루(crest)와 골(trough)이 대체로 서로 정렬되지 않기때문이다. 이를 탈조라 표현한다.
-비동기 다상 모터
비동기란 샤프트의 회전 속도가 모터의 동기 속도와 일치하지 않다는 뜻이다. 좀 더 구체적으로 말하면 비동기 모터의 회전자는 동기 속도보다 낮은 속도로 회전한다.
-1 전자기 유도
자기장이 변하는 영역에 도체를 놓으면 표면에 전압의 차가 발생한다. 이를 '전자기 유도' 현상이라 하며 이러한 전압이 유도 전압이다. 유도 전압의 크기는 자기장이 변하는 속도에 비례한다.
유전 전압탓에 도체에 전류가 생성된다. 통전 도체를 자기장 안에 두면 그 도체는 움직이는 힘을 받는다. 모든 비동기 모터는 이 원리에 바탕을 둬 흔히 유도 모터 또는 AC 유도 모터라 부른다.
기본 작동 과정은 다음과 같다.
>>AC모터에 입력된 다상 전력으로 인해 모터의 고정자에서 자기장의 변화가 발생한다.
>>유도 모터의 회전자에는 자석 대신 도체가 달려있다. 이러한 도체가 고정자에 들어가면 각각의 도체에 유도 전압이 발생한다.
>>각 도체가 받은 유도 전압으로 인해 전류가 생성된다. 따라서 각 도체마다 힘이 발생하는데, 이 힘으로 회전자를 회전시킨다.
유도 전압으로 인해 발생된 힘은 회전자의 도체가 고정자의 자기장과 교차할 때만 나타난다. 회전자의 도체가 자기장과 같은 속도로 회전하면 서로 교차하지 않기 때문에 아무 힘도 발생하지 않는다. 그래서 유도 모터의 회전자는 항상 고정자의 자기장의 회전 속도보다 느리게 회전한다.
비동기 모터의 회전속도(n)와 동기속도(ns)의 관계를 슬립(slip)이라 부른다. s = (ns-n)/ns
비동기 모터에서 전형적으로 나타나는 속도-토크 그래프 (메이커를 위한 실전 모터 가이드)
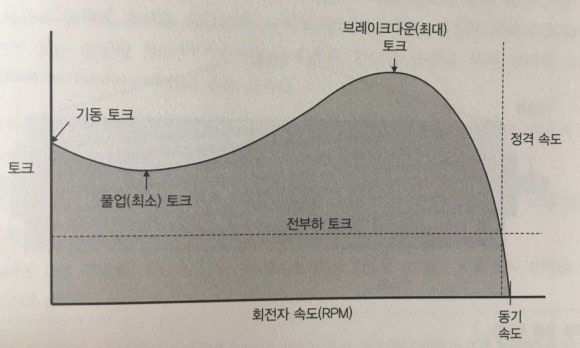
부하가 증가할수록 최대 토크(breakdown torque)에 도달하는 데 필요한 토크도 커진다. 최소 토크(pull-up torque)는 기동 토크와 브레이크 다운 토크 사이에 나는 최소 토크다.
모터의 데이터시트에 명시된 속도는 정격 속도(rated speed)라 부른다. 모터가 정격 속도로 회전할 때 발생하는 토크는 정격 부하(전부하, 완전 부하) 토크라 부른다. 모터의 슬립은 정격 속도와 동기 속도로 계산할 수 있다.
모터의 속도가 동기 속도와 같아지면 토크가 발생하지 않는다. 회전자의 도체가 회전 자기장과 교차하지 않기 때문이다.
(http://wiki.modulestudy.com/images/기기4-1.jpg)

회전자의 표면에 달린 도체는 보통 구리나 알루미늄으로 만들고, 심은 철로 만든다. 도체는 철로 된 엔드링을 통해 서로 연결된다. 코깅(모터가 멈추는 현상)을 줄이기 위해 도체를 일정한 각도로 비스듬히 틀어둔다.
농형 회전자의 가장 큰 장점은 간결함과 안정성이다. 회전자에 움직이는 부분이 달려 있지 않기 때문에 고정하거나 교체하기 쉽다. 농형 회전자를 사용할 시 간결하고 안정적이고 저렴해 크게 만들기도 한다. 가장 큰 단점은 속도-토크 속성을 바꿀 수 없다. 모터 밖에서 회전자의 도체에 접근할 수 없어 속도를 높이거나 낮추기 위해선 입력 전력의 주파수를 변경할 수 밖에 없다.
(http://www.ys2000motor.co.kr/mall/data/cheditor/0807/data12.gif

농형 회전자의 단점을 개선해 만든 모터다. 회전자에 권선이 달려 있다는 점에서 브러시 DC모터와 비슷한데 2 가지 차이점이 있다.
>>브러시 대신 회전자의 한쪽 끝에 달린 슬립링을 통해 코일과 외부 회로를 연결한다. 각 위상마다 슬립링이 하나씩 달려 있다.
>>브러시 DC의 코일과 달리 WRIM에 있는 코일은 모터의 외부에서 전력을 받지 않는다.
다른 유도 모터와 마찬가지로 WRIM의 회전자는 외부 전원이 아닌 전자기 유도를 통해 전류를 받는다. 샤프트에 달린 슬립링을 통해 가변 저항에 연결된다.
코일의 저항을 높이면 고정자의 자기장 세기가 줄어든다. 이를 통해 모터에 필요한 기동 전류의 양을 크게 줄일 수 있다. 대형 머신은 이러한 특성을 이용해 엄청난 양의 전력을 절약할 수 있을 뿐만 아니라 기동 실패율을 낮출 수 있다.
- 동기 다상 모터
동기 모터의 회전 속도는 동기 속도와 같다. 고정자의 구조는 비동기 모터와 동일하나 회전자는 완전 다르다. 회전자의 구조에 따라 3가지로 구분한다.
-1 이중 여자 동기 모터
회전자에 권선(쩐자석)이 달려 있는데, 이는 모터의 외부로 부터 전류를 받는다. 이때 회전자와 고정자 모두 전력을 받기 때문에 이중 여자라 부른다. 회전자는 AC가 아닌 DC전류를 받으며, 회전자의 샤프트에 달린 슬립링을 통해 전달된다.
모터를 구동한 후 슬립링을 통해 전류가 전달되면 회전자의 권선은 전자석처럼 작동한다. 전자석의 N극과 S극은 고정자의 회전 자기장의 반대극에 끌린다. 이렇게 끄는 힘으로 회전자가 회전하는데 이때 속도는 고정자의 자기장 속도와 같다.
-2 영구 자석 동기 모터(PMSM)
회전자에 영구 자석이 달려있다. 이로인해 BLDC와 개념상 구조가 같다. 차이점은 고정자의 권선에 전류를 공급하는 방식에 있다. PMSM은 BLDC와 달리 고정자의 권선은 AC 전력을 받는다. 따라서 역기전력이 발생하는 형태도 다르다. BLDC는 사다리꼴인데 반해 PMSM은 사인파 형태를 띤다.
-3 동기 릴럭턴스 모터
가장 간단한 구조로 회전자는 전력을 공급받지도 않고 영구 자석이 달려 있지도 않다. 대신 회전자를 자기장에 반응하는 강자성 물질(주로 철)로 만든다. 회전자의 가장자리에서 일정한 영역을 제거해 나머지 부분에 고정자의 자기장을 집중시킨다. 이렇게 남은 영역을 돌극이라 한다.
작동 원리는 스테퍼와 비슷하다. 회전자는 고정자의 자기저항을 최소화하도록 자기장을 따라간다. 차이는 역시는 공급되는 전원에 있다.
-단상 모터
-1 분상 모터
분상(위상 분리)은 신호로부터 서로 다른 위상을 가진 두 개의 신호를 뽑아낸다는 뜻이다. 분상 모터는 단상 입력 전력의 위상을 분리함으로써 고정자에 회전 자기자을 생성한다.
이렇게 작동하기 위해 분상 모터의 고정자에 주 권선과 보조 권선이 있다. 보조 권선은 주 권선에 비해 저항이 높고 인덕턴스가 낮다. 그래서 두 권선에 흐르는 전류의 위상이 다르다.
위상차가 작으면 자기장도 약해서 토크도 낮아진다. 하지만 분상 모터는 분상을 통해 스스로 구동할 수 있다. 모터를 구동한 후 회전자의 속도가 정격 속도에 다다르면, 스위치가 열리면서 보조 권선으로 들어가는 전력을 차다한다.
-2 커패시터 기동 모터
핵심 구조가 분상 모터와 같지만, 보조 권선에 커패시터를 직렬로 추가해 분상 모터를 좀 더 개선한 것이다.
커패시터를 통해 주 권선 전류와 보조 권선 전류 사이의 위상차가 커진다. 이렇게 늘어난 위상차로 인해 기동 토크도 높아진다는 점은 커패시터 기동 모터가 분상 모터에 비해 뛰어난 대표적인 장점이다.
커패시터 기동 모터의 회로는 모터의 속도가 정격 속도에 다다르면 스위치를 열어 커패시터와 보조 권선으로 들어가는 전력을 차단한다.
- 3 셰이디드 폴 모터
이 모터는 보조 권선뿐만 아니라 다른 부품을 새로 달지않고, 고정자의 주 권선 모양만 바꿨다. 철심의 일부분을 잘내서 도체 링으로 둘러싸게 만든 것이다. 이러한 도체 링을 셰이딩 코일이라 부르며, 모터에서 중요한 역할을 한다. 회전자의 도체와 마찬가지로 이 링도 유도 전류를 생성하는 유도 전압을 받는다. 이렇게 생성된 전류는 권선의 다른 전류와 위상이 다르다. 따라서 두 개의 위상이 다른 전류로 인해 회전자기장이 생성된다.
-AC모터 제어
AC모터 중 다중 속도 모터는 고정자의 극을 연결하거나 끊는 방식으로 속도와 토크를 제어한다. AC모터를 좀 더 제어할 수 있도록 와전류 드라이브와 가변 주파수 드라이브가 나왔다.
-1 와전류 드라이브
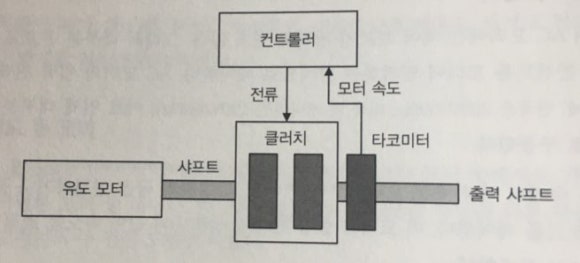
전통적인 모터 제어 방식은 아니다. 모터의 작동 방식을 변경하지 않고, 모터의 샤프트 회전을 두 번째 샤프트의 회전으로 변환한다. 두 번째 샤프트는 원하는 토크와 속도로 회전한다. 다음 4 가지 부분으로 구성된다.
>>고정 속도 유도 모터
>>클러치 : 모터의 샤프트와 출력 샤프트를 연결하는 장치
>>타코미터 : 출력 샤프트의 위치를 측정하는 장치
>>컨트롤러 : 타코미터에서 데이터를 읽어서 클러치로 전류를 전달하는 장치
(메이커를 위한 실전 모터 가이드)
-2 가변 주파수 드라이브(VFD)
모터와 전력선 사이에 연결한다. 주된 기능은 모터에 원하는 전압과 주파수의 전력을 생성하는 것이다. 입력 전력을 모터에 맞게 조절할 수 있다. 이를 통해 비용을 줄이고 모터 수명을 연장할 수 있다. 작동 과정은 다음과 같다.
>> 입력 AC전력을 DC저력으로 변환한다. 이 과정에서 정류와 평활화를 거친다.
>>인버터는 원하는 전압과 주파수에 맞는 PWM신호를 생성한다.
대부분의 경우 모터는 주파수에 관계없이 최대 토크를 내야 한다. 그래서 대다수의 VFD는 전압/주파수 비율을 일저하게 유지한다.
-3 VFD 고조파 왜곡
정류기가 아무리 뛰어나더라도 출력 전력은 여전히 원래 입력된 AC전력의 흔적이 남아있따. 좀 더 구체적으로 표현하면 원래 입력된 주파수의 배수만큼의 주파수가 출력에 담겨 있따. 이러한 주파수를 고조파라 부르며, VFD의 출력에 고조파가 남이있으면 모터를 정밀하게 제어하기 어렵다.
고조파로 발생하는 가장 큰 문제는 노이즈다. 고조파 왜곡으로 인해 모터의 동작이 약간 달라져서 소음이 발생할 수 있다. 또한 전력의 고주파 성분이 전기 회로나 RF통신에 간섭을 일으킬 수 있다.
이를 해결하기 위해 멀티펄스 VFD를 사용하면 좋지만 비싸고 크다. 다른 방법으론 로우-패스 브로드밴드 필렁기법과 인덕터를 VFD의 전력과 직렬로 연결하는 방법이 있다. 인덕터의 임피던스는 주파수에 따라 증가하는데, 신호에서 고주파 성분을 줄이는 데 사용하는 인덕터를 DC초크라 부른다.
-7 유니버설 모터
이 모터는 DC전력과 단상 AC전력으로 작동할 수 있다. 일종의 직권 브러시 DC 모터로서 AC전력을 받을 수 있도록 구조를 살짝 변한 것이다.
DC모터를 AC전력으로 구동하면 회전자와 고정자의 권선으로 인해 회로에 엄청난 양의 인덕턴스가 발생하는 문제가 생겨난다. 이로인해 전압과 전류 사이의 위상차가 거의 90도에 가깝게 증가하는데 모터가 제대로 작동하기 힘들어진다. 이를 해결하기 위해 유니버설 모터에 보상 권선을 직렬로 장착한다. 또한 고정자의 인덕턴스를 줄이기 위해 고정자의 권선에 감긴 전선의 수도 최소로 유지한다.
이 모터의 가장 큰 장점은 기동 토크가 높다는 것이다. 반면 가장 큰 단점은 브러시를 사용한다는 것이다. 이로인해 효율성이 떨어지며 작동 과정에서 발생하는 마찰과 열로인해 수명이 단축된다.
'기록하고 싶은 내용 > 책' 카테고리의 다른 글
| 메이커를 위한 실전 모터 가이드(10) - 리니어 모터 (0) | 2018.10.29 |
|---|---|
| 메이커를 위한 실전 모터 가이드(9) - 기어와 기어모터 (0) | 2018.10.29 |
| 메이커를 위한 실전 모터 가이드(7) - 서보 모터 (0) | 2018.10.29 |
| 메이커를 위한 실전 모터 가이드(6) - 배터리 (0) | 2018.10.29 |
| 메이커를 위한 실전 모터 가이드(5) - ESC(Electronic Speed Control) (0) | 2018.10.29 |