기어모터는 전기 모터에서 기어를 장착한 것이다. 기어를 사용하면 부하에 전달되는 토크는 높이고 속도는 줄일 수 있다. 이때 적절한 모터를 선택하는 것이 중요하다.
- 기어
모터의 샤프트에 연결할 수 있는 톱니가 달린 부품이다.
-1 전력 전송
모터의 파워는 토크에 각속도를 곱한 것과 같다. 모터의 샤프트에 기어(입력 기어)를 장착하고, 여기에 두 번째 기어(출력 기어)를 연결한 경우를 생각해보자. 이상적인 상태라면 입력 기어로 전달된 모든 파워가 추력 기어로 전달돼야 한다. 즉 t0w0 = tiwi다.
출력 기어의 톱니가 더 많다고 가정하면 입력 기어가 1바퀴 돌때 출력 기어는 입력 기어 톱니수/출력 기어 톱니수 만큼 회전한다. 하지만 기계적인 에너지양은 동일하므로 출력 기어의 토크가 훨씬 높아진다.
실제로 모터를 사용하는 시스템에서 토크를 높이기 위해 큰 기어를 장착하는 경우가 많다. 이렇게 하면 출력 속도가 입력 속도보다 낮아지는데 이를 기어 감속이라 부른다. 흔히 X:1로 표기하는데, 여기서 X는 토크의 증가량에 비례한다. 이렇게 증가한 토크를 흔히 기어의 기계적 이득이라 한다.
기어가 서로 맞물려서 돌아갈 때 접촉 마찰로 인해 출력 기어로 전달되는 에너지가 감소한다. 이러한 에너지 손실은 효율에 대한 수식으로 표현할 수 있다. n(기어) = P(출력)/P(입력) = t0w0/tiwi
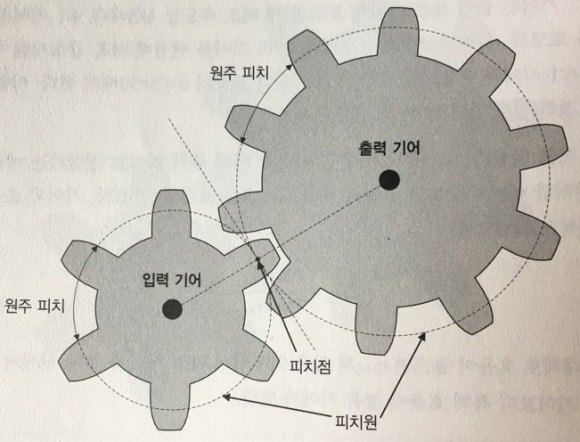
기어의 속성은 '48p90t'라 표기하면 t는 기어 p는 피치를 의미한다. 기어에는 원주 피치와 지름 피치가 있다.
기어의 회전 방향을 표시한 선과 중심을 이은 선이 교차하는 점을 피치 점이라 한다. 그리고 나머진 그림의 설명과 같다.
지름 피치는 톱니와 피치 지름의 비율이다. 예를 들어 48p라고 적혀 있으면, 피치 지름의 1인치에 48개의 톱니가 달려 있다는 의미다.
-3 백래시
실제로 기어의 톱니 사이에 일정한 유격이 존재한다. 따라서 입력 기어가 살짝 움직여도 출력 기어의 움직임에 영향을 주지 않을 수 있다. 또한 입력 기어의 방향을 바꿀 때 출력 기어의 톱니와 맞물리기까지 시간 차가 발생한다. 이런 손실을 슬로프와 플레이 또는 백래시라 한다.
약간의 백래시는 재밍(jamming)의 발생 가능성을 줄이고 윤활제를 넣을 공간을 확보하고 열팽창과 톱니마다 미세한 두께의 차이를 완충하는 역할을 한다. 기어를 설계할 때 백래시의 크기는 톱니 폭의 두 배보다 약간 크게 정한다. 다시 말해 원주 피치가 톱니의 폭의 두 배보다 크게 만든다. 또 다른 방법으로 맞물린 두 기어가 좀 떨어져서 움직이는 형태로 백래시를 늘리기도 한다.
- 기어의 종류
기어는 전원에서 부하로 전달되는 토크나 속도, 방향을 바꾸기 위한 용도로 사용된다.
-1 스퍼 기어
톱니바퀴 기어다. 가장자리에 톱니가 달린 원판 형태로 구성되며, 스퍼 기어에 붙은 샤프트끼리 항상 수평을 이룬다.
핵심 특징은 피치와 톱니 수다. 이를 XP YT로 표기하는데 X는 지름 피치(지름 1인 톱니 수), Y는 톱니 수다.
스퍼 기어는 진동이 발생한다는 단점이 있다. 항상 하나 또는 두 쌍의 톱니가 물려있는데 이를 기어의 물림률이라 한다. 대체로 1.2~2다. 기어의 속도가 높아지면 접촉면의 갑작스런 변화로 인해 진동이 발생한다. 이런 진동은 기어를 닳게 하고 전체 시스템의 안정성에 영향을 준다. 특히 소음이 심하다. 접촉면의 변화로 진동뿐만 아니라 톱니에 스트레스를 줘 전달되는 에너지의 양이 준다.
-2 헬리컬 기어
나선형 기어다. 스퍼 기어로 인해 발생한 진동을 줄이기 위해 톱니가 부드럽게 맞물릴 수 있는 형태로 고안된 거이다. 이러한 기어의 톱니는 헬릭스 각만큼 틀어져 있다. 톱니가 기울어져 있기 때문에 한 번에 여러 개의 톱니가 맞물릴 수 있따. 물림률은 2.2~4다. 진동과 노이즈가 적기 때문에 스퍼 기어보다 에너지가 부드럽게 전달된다.
단점은 기어의 회전 방향에 수직으로 일정한 힘이 작용한다는 것이다. 이 힘은 헬릭스 각에 따라 달라진다.
이를 사용하는 시스템에서 축방향 힘을 제어하려면, 스러스트 베어링을 이용해 시스템의 손상을 줄여야 한다. 또한 기어의 마찰로 엄청난 열이 발생한다. 이로인해 효율이 떨어진다.
기울어진 톱니로 인해 발생하는 축방향 힘을 제거하기 위해 양방향으로 기울어진 톱니가 달린 헬리컬 기어가 등장했다. 이를 헤링본 기어라 부른다. 대부분의 경우 헬리컬 기어는 샤프트와 같은 방향으로 연결되지만, 서로 평행을 이루지않는 샤프트 사이에서도 에너지를 전달하게 만들 수 있다. 이러한 형태로 구성된 헬리컬 기어를 크로스 기어라 부른다. 그중에서 샤프트가 서로 수직을 이루는 헬리컬 기어를 스큐 기어라 부른다.

-3 베벨 기어
원뿔의 표면에 톱니가 달린 형태다. 두 개의 베벨 기어가 서로 맞물릴 때 두 샤프트 사이의 각도는 각 기어의 피치각의 합과 같다. 베벨 기어의 피치각은 대부분 45도며 맞물린 베벨 기어의 샤프트는 서로 수직을 이룬다.
톱니가 스퍼 기어처럼 직선인 베벨 기어를 직선 베벨 기어라 부르고 곡선인 것을 곡선 베벨 기어라 한다. 곡선 베벨 기어 중에서도 전반적인 형태가 원뿔이 아니라 쌍곡선처럼 부드러운 곡선형으로 생긴 것이 있는데, 이를 하이포이드 기어라 부른다.
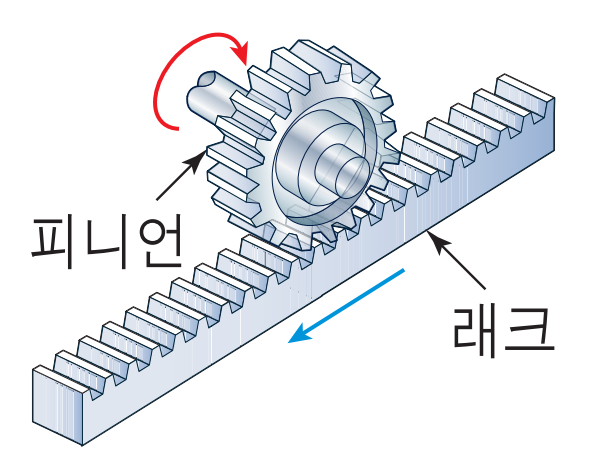
피니언 기어는 일종의 스퍼 기어 또는 헬리컬 기어며, 랙기어는 톱니가 달린 직선 막대로서 피니언 기어와 맞물린다. 랙 기어는 반지름이 무한대인 스퍼/헬리컬 기어라고 볼 수 있다. 대다수의 시스템에서 피언 기어를 입력 기어, 랙 기어를 출력 기어로 사용한다.

나사처럼 좁고 기다란 막대의 표면에 가느다란 나사산이 달려 있다. 나사와 달리 끝이 뾰족하게 좁아지지 않고, 전반적으로 일정한 반지름을 가진 원통처럼 생겼다.
베벨 기어와 마찬가지로 웜 기어도 입력 회전의 방향을 90도 만큼 바꾼다.
웜 기어가 한 바퀴 돌 때마다 이와 맞물린 기어는 이 하나만큼 이동한다. 따라서 기어 감속비는 연결된 기어의 이의 수에 따라 결정된다. 웜 기어의 가장 큰 장점은 좁고 막힌 공간에서 기어 감속을 크게 할 수 있다는 것이다.
웜 기어는 한 방향으로만 에너지를 전달할 수 있다. 다시 말해 웜 기어로 스퍼 기어를 돌릴 수 있지만, 반대는 불가능하다. 따라서 웜 기어에 연결된 입력 샤프트는 출력 샤프트의 움직임에 영향을 받지 않는다.
상대편 기어와 항상 일정한 영역이 맞물린 상태로 제자리 회전해 적은 진동으로 조용하게 회전할 수 있는 반면, 마찰로 인해 열이 발생한다. 이로인해 다른 기어에 비해 효율이 떨어지는데, 기어 감속비가 높을수록 떨어진다.

상당히 큰 기어 감속비를 제공할 수 있으며, 출력 샤프트와 입력 샤프트의 방향과 중심이 서로 같다. 따라서 기어를 지탱하기 위해 샤프트를 별도로 달지 않아도 된다.
유성 기어에는 중심이 서로 같은 두 개의 기어가 달려 있다. 하나는 안에서 도는 태양 기어, 다른 하나는 외부에서 회전하는 링 기어다. 두 기어 사이에는 행성 기어라 부르는 기어가 두 개 이상 달려 있다. 각 행성 기어는 태양 기어와 링 기어에 맞물린다.
유성 기어는 대부분 캐리어 또는 케이지라 부르는 하나의 회전 요소에 연결돼 태양 기어 주위로 일정하게 회전한다.
기어 감속비는 입/출력에 사용되는 기어에 따라 변한다. 흔히 입력 샤프트를 태양 기어에, 출력 샤프트를 행성 캐리어에 연결한다.이러면 큰 기어 감속비와 태양 기어에서 여러 개의 행성 기어로 토크를 고르게 전달할 수 있다.
'기록하고 싶은 내용 > 책' 카테고리의 다른 글
| 알파고처럼 진화하는 스마트카의 미래(1) - 전기자동차 (0) | 2018.10.29 |
|---|---|
| 메이커를 위한 실전 모터 가이드(10) - 리니어 모터 (0) | 2018.10.29 |
| 메이커를 위한 실전 모터 가이드(8) - AC모터 (0) | 2018.10.29 |
| 메이커를 위한 실전 모터 가이드(7) - 서보 모터 (0) | 2018.10.29 |
| 메이커를 위한 실전 모터 가이드(6) - 배터리 (0) | 2018.10.29 |